Aerospace Jam – SPASH Timeline of Progress
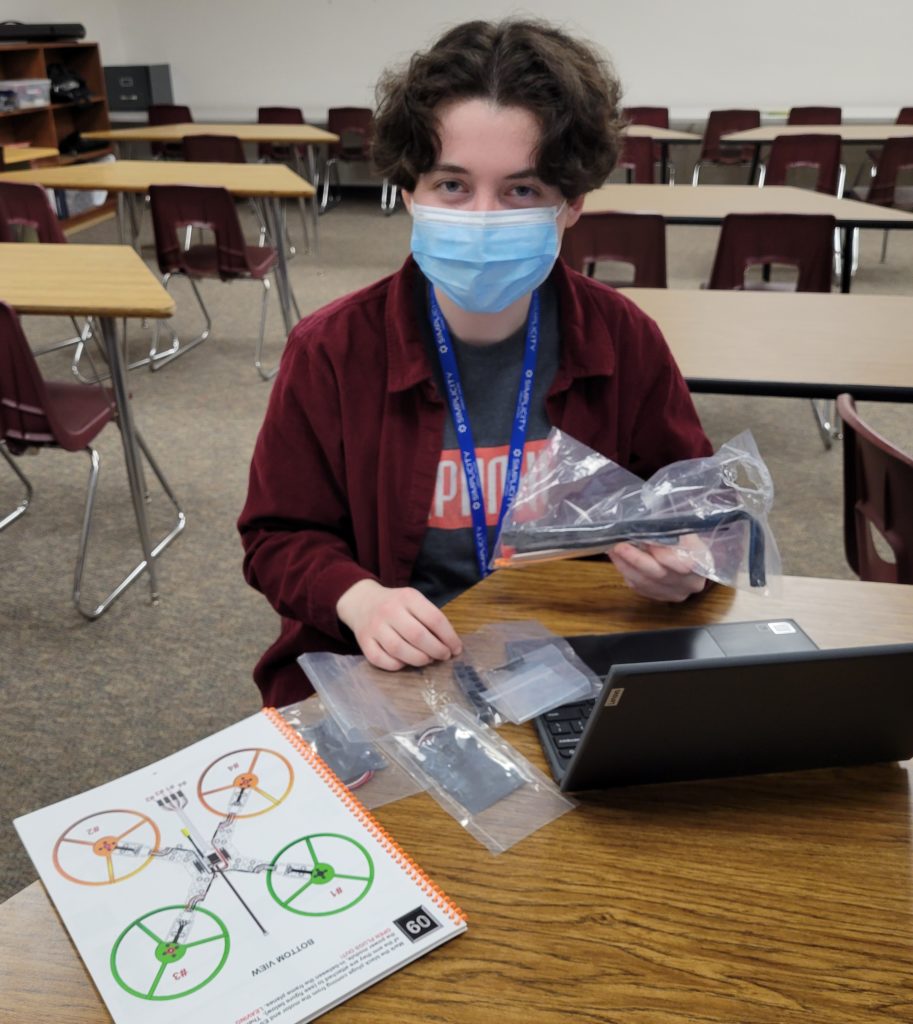
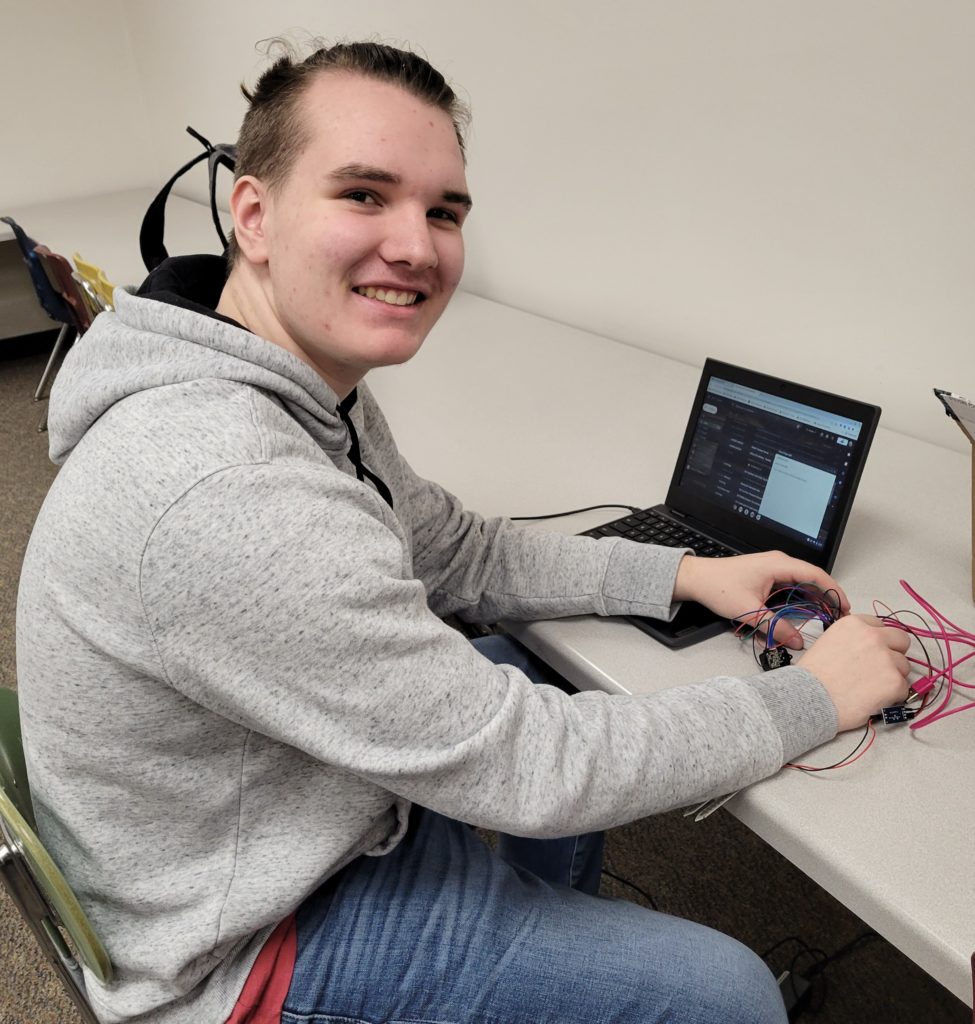
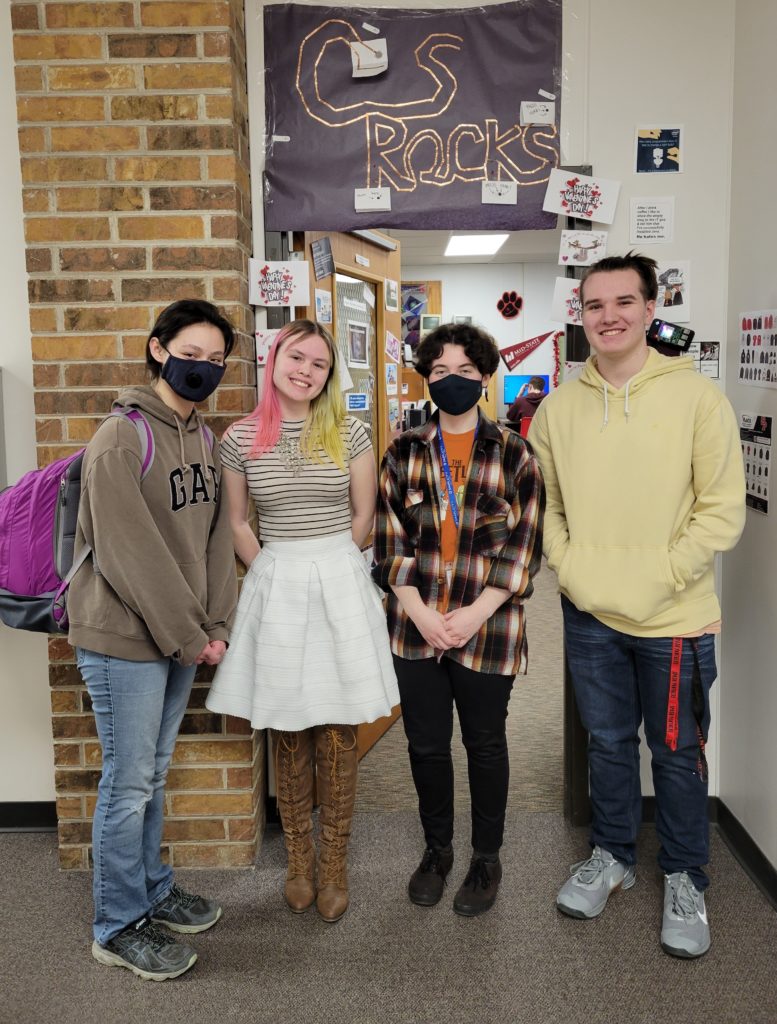
Meet the SPASH Aerospace Jam team!
Corinne, Sarah, Ben and Thea


Corinne: I am a senior in high school, planning on majoring in computer science at a four-year school. My current choice is UW-Madison, but I am still waiting for other decisions. In my free time, I enjoy learning about prosthetics and dabbling in languages
Sarah: I’m a senior in high school, going on to study physics and mathematics at a four-year university in the fall. In my free time I also enjoy learning about government structures and participating in theater.
Ben: I am a Junior at Stevens Point Area High School and will continue my studies there next year. In my free time, I enjoy learning more about computer science and engineering and plan to pursue a career in the field.
Thea: I am a senior at SPASH, and intend to attend UW-Madison to study software development.
Final Blog before the competition: April 1st: This week we have been finishing up our sensors and submitting our work as necessary for the competition. We are still struggling with the Lidar but have reached out for some help. Besides that, we are excited for the competition next week!
January 28th:
This week we spent quite a bit of time working on the spectrometer. We have been able to get readings but we believe our calibration may be off, so that will need to be fixed. Besides that, we are also looking into the last few sensors to get started on their programming and adding it to the Arduino.
February 4th:
We spent some time away from the color sensor, we’re struggling with understanding what the data means
or if it’s accurate. Instead, we started reviewing the essay that we need to write for the competition. With
that we also got the IMU working, but not translated into useful data. Next, we will start work on the
LIDAR and essay and continue work color sensor and IMU.
February 11th:
We worked entirely on the IMU. So far we were able to troubleshoot it, and get proper data for the roll and
the pitch. The yaw works but needs to be corrected a bit. We also have the app prepared to take data from
the Bluetooth and IMU once that is finished. We plan to finish the IMU next week and hopefully, there
will be a starting tutorial for the next sensor or we will just look it up ourselves.
February 18th:
We have gotten calibration to work, but we need to use some math to use the data it gives us to truly
calibrate the IMU. This week we also considered and wrote down what questions we will have for Eric.
Next week we might meet with Eric, otherwise, we will finish calibration and start the Hall sensor.
February 25th:
This week we completed the Hall sensor, and have begun our last sensor – the Lidar. We also worked on
connecting all the sensors, since Arduino nano every doesn’t have many pinouts, but we didn’t complete
that. We also prepared for a meeting with Mike with questions and such. Next week we will hopefully be
done or nearly done with Lidar and can focus on fine-tuning our sensors.
March 4th:
This week we received our controller and are working on preparing a place to practice flying the drone. We are considering the auditorium or gym, but we will of course need permission to do so. We also have the Lidar to complete and that should be the last sensor to be implemented into our system. We are struggling with the pinouts but plan to ask Mike about such.
March 11th:
We seem to have half completed the build of the drone so far. The drone should be completed shortly. We did not do anything with code this week besides talking to Mike — we expect that the final program should be completed shortly as well. We also completed our certification and the essay is well on its way to being submitted.
March 18th:
This week we had finished building the drone but sadly, at the moment of testing it didn’t do anything so we have to go back and look into it more when we get back to school. The essay is being submitted tonight or tomorrow, and last week Ben worked more on the new Arduino but didn’t get any further so we might just go back to the old Arduino considering we only have two more weeks.

October 28th:
So we are still trying to get the Bluetooth working. We have tried the software to see if it had issues, but now we’re checking the hardware. We tried replacing wires and moving things around. So far we only know that the Bluetooth does connect, and the light on the Arduino does work. We aren’t sure if we are receiving information that might be the issue. For the next class, we are really trying to get the Bluetooth to transmit information even if we need to work on the light itself still.
November 5th:
We continued to work on trying to connect the Arduino. We watched multiple tutorials, tried multiple different codes and hardware but it is yet to turn on a light on the Arduino. We did not accomplish anything today, we purely worked on this. Next time we hope to finally get that light on, likely with help from Eric, who we have a meeting with Monday at 7:30.
November 8th:
We are still working on the Bluetooth, we retested the light and the console, and both work yet. We had a meeting, but it had been canceled. Next, we are going to try to learn more about both the Arduino and Bluetooth connections, including what VIN and RST are.
November 29th:
We worked on understanding the soil moisture sensor, and we got it to work. We checked and it lowers in numbers the higher the moisture. Normal conditions seem to be in the 750’s ish. The only impediment this time was time. Next, we want to get the Bluetooth and the moisture sensor connected and working.
December 3rd:
We were able to receive information from the Bluetooth and turn it into visible information on the MIT app inventor. What wasn’t making this faster than it could have been was that we mixed up / did not mix up the RX and TX. Next time we want to have the moisture sensor working and sending the data to the mit app inventor.
December 9th:
So we worked on the spectrometer and got it working. We really didn’t run into any issues. The next thing we want to do is to either translate the spectrometers data to something humans can read. Outside of this class we’ve also been fixing the breadboard to make it cleaner, looking through the Arduino website to ensure we understand everything about the competition, and other things like that.
December 10th:
Ben and I are working on calibrating the spectrometer. We made the equation and the method but we have one issue: we can’t download the things we need for the MIT app inventor because the school internet blocks it. We talked to the tech center but they need Mrs. Kaster’s approval to bring down the wall or something for a while so that we can get what we need done. But beyond wanting to murder the firewall, alot has been completed in the past two weeks and we have gotten over half of the sensors to work so far.
December 13th:
We were able to get the calibration working and we combined the code into one master copy. Next we want to take the data from the spectrometer and put it into something readable in MIT so that we can actually use the data. We need to be able to download something for it though so we need to wait for Mrs. Kaster to come back for that.

September 24th:
We worked on making sure we both understood the competition, we studied our pieces and the
expectations of them. The only issue is that we don’t know enough about the drone itself. Because of that, we are going to be spending time learning Arduino.
October 8th:
We worked on learning the pins of the Arduino Nano, as well as trying to get a lightbulb to light up. We spent the majority of the time troubleshooting errors. We have not gotten the light bulb to light up yet because of the errors. Next time we would like to get this working with hopefully the lights blinking in order.
October 15th:
Today we finally figured out how to get the Arduino blinking. Our impediment along the way was that the Arduino automatically blinked, and the code blinked at the same rate, so we noticed no difference. We solved this when we sped up the blink rate. We had spent some time testing different versions of the Arduino in case we had the wrong one, and we watched quite a few videos. Next time we want to start implementing some of the other testing pieces given to us (as shown in video 2 of the aerospace jam).
October 21st:
We worked on the servo code and were able to connect it and get it working. Then we moved on to the MIT App inventor and made the code for both the Arduino and app. We weren’t able to get the app running or be sure the Bluetooth connected because we ran into some errors in the code. Tomorrow we want to get them both up and running.
October 22nd:
Well, now we’ve run into some issues. We were able to get the Bluetooth connected and show that it’s receiving and transmitting information, but we can’t get the code to do what it is supposed to. We have narrowed down the issue to be between either the Arduino’s or app’s code. We are going to keep trying things and changing code to try and get the Bluetooth to set off the light on the Arduino.